
Automatisiertes Fahren und Elektromobilität sind zwei der Schlüsseltechnologien für die Zukunft des Straßenverkehrs. Automatisiertes Fahren bietet das Potential zur Reduzierung von Unfällen, die durch menschliches Versagen hervorgerufen werden und zur Verbesserung des Verkehrsflusses, der Energieeffizienz und des Fahrerkomforts. Elektromobilität wird als zentrale Komponente eines nachhaltigen und klimafreundlichen Verkehrssystems auf der Basis von erneuerbaren Energien angesehen. Die Aktivitäten des DLR Instituts für Systemdynamik und Regelungstechnik im Automobilbereich tragen entscheidend zu diesen Technologien bei. Wir entwickeln vielseitige und innovative Ansätze für mechatronische X-by-Wire Fahrwerke mit dem Ziel der simultanen Verbesserung von Energieeffizienz, Fahrsicherheit und Komfort. Wesentliche Forschungsgebiete sind die Entwicklung von modell- und KI-basierte Regelungssystemen mit dem Fokus auf Bewegungsplanung, Fahrdynamik- und Fahrwerksregelung, Schätzung des Fahrzeugzustands, modellprädiktive Gesamtfahrzeugregelung und aktive sowie semi-aktive Vertikaldynamikregelung, zusammen mit anderen Kernthemen der Elektromobilität. Diese beinhalten Energiemanagement, Batterieregelung und Zustandsschätzung für Batterien.

Bewegungsplanung
Die oberste Schicht der skalierbaren Fahrdynamikregelungsarchitektur bildet eine generische Anwendungsschicht, welche interaktives Fahren, Fernsteuerung des Fahrzeugs und semi- oder voll autonomes Fahren beinhaltet.

Fahrdynamikregelung
Die integrierte Fahrwerksregelung überaktuierter X-by-Wire-Architekturen (wie beim ROboMObil), bei der Lenkwinkel, Antriebs- und Bremsmoment jedes Rades individuell vorgegeben werden können, ist ein zentrales Forschungsthema am Institut.
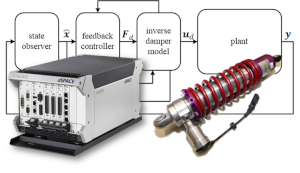
Aktuatorregelung
Die unterste Schicht der skalierbaren Architektur der Fahrdynamikregelung bezieht sich auf die Aktuatoren. Sie umfasst die physikalische Ausführung der Steuerbefehle der übergeordneten Bewegungsschicht.

Methoden und Werkzeuge
Key research topics are the development of AI enriched methods and toolboxes for control and system diagnostic tasks plus the development of fault tolerant control for highly automated (battery electric) X-by-Wire vehicles.