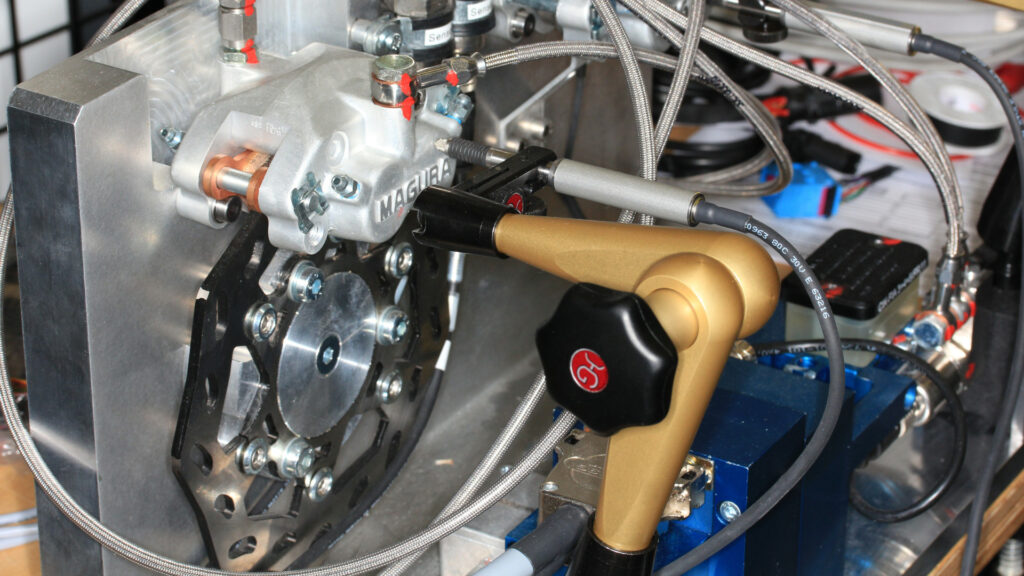
The electro-hydraulic brake system of the ROboMObil is a complex system consisting of a permanent magnet synchronous motor (PMSM) and a ball screw mechanism actuating an automotive hydraulic master brake cylinder. The brake cylinder generates and distributes the hydraulic pressure for the disc brakes. Stiffness and mechanical play were examined, similar as with the steering actuation system. The braking testbench is composed of the same braking actuator as in the ROboMObil together with the corresponding power electronics. Moreover, it is equipped with the identical hydraulic piping and the same disc brakes. Additionally, high-resolution pressure and position sensors and a mechanism to simulate leakage were fitted to the test bench. A force sensor substituting one braking disc is used to directly measure the brake piston force. Analogous to the steering test bench, this test bench was used for validation of the modeling and of the fault tolerant control strategies. The aforementioned leakage mechanism allows fault injection into the hydraulic system and the corresponding sensor systems.