Here, a novel autonomous parking concept for the four wheel-steerable robotic electric vehicle ROboMObil was presented. ROboMObil’s extraordinary manoeuvrability including rotations and lateral driving and its capability of autonomous driving was demonstrated in the application of parallel parking. The whole process is described starting with the perception to identify a suitable parking spot in the near environment, planning the manoeuvre, and executing it autonomously. The proposed parking method is free of assumptions and does not use any information about the environment from an external source. Test results with the real vehicle can be seen in the video to show the feasibility of the concept.
The strength of such a robotic vehicle concept can be demonstrated best in a scenario that on the one hand emphasizes its high manoeuvrability and on the other hand is a tedious task if driven manually. Parking space is becoming a rare good in inner cities. Even if the dimension of the space is sufficient for the car, it is not guaranteed that the driver will succeed in parking there. Parallel parking is the perfect scenario to show the different motion modes of the ROboMObil and its autonomous driving abilities.
3D Segmentation
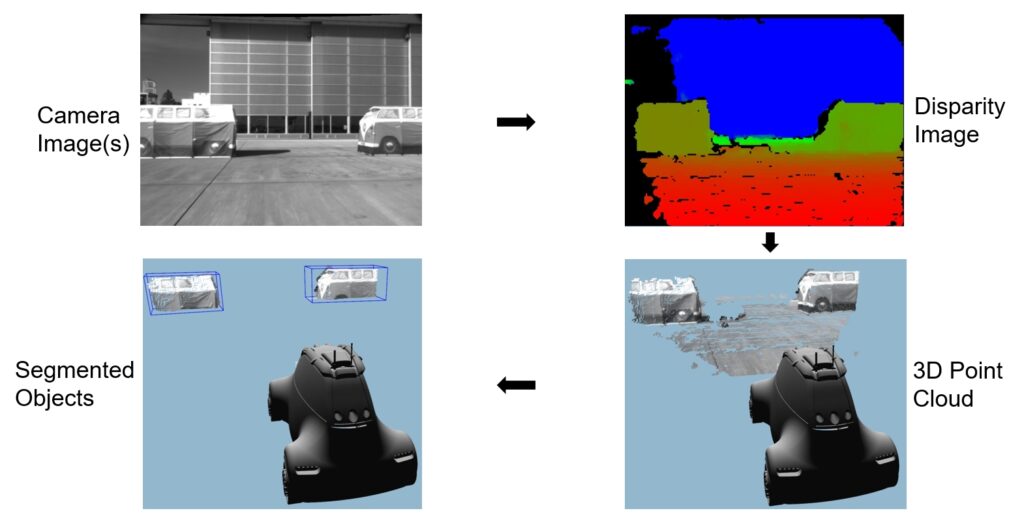
The segmentation process has the principal objective of breaking down a rigid 3D-reconstruction image into individual 3D entities. Groups of 3D points are clustered that possibly belong to one entity in the real world. The benefit of this process is twofold. First, we obtain a gross impression on how the scene is spatially structured, which is also required for 2D/3D map building. Second, every single clustered entity, or 3D blob, might have a semantic meaning by its own. This means that the segmented 3D-blobs represent the potential actor candidates in the scene: pedestrians, (part of) cars, buildings, traffic lights, etc.
Blob Merging
Even a dense 3D reconstruction algorithm, such as the semi-global matching used here, is not able to provide a depth value for every pixel in an image. The reason can be e.g. homogeneous textures or reflections. Vehicles tend to have both properties and therefore a parking car is not always reconstructed as a closed point cloud. The described segmentation algorithm may identify parking car as several neighboring objects. This is obstructive for the planning algorithm that detects parking spots for the ROboMObil. Hence, an object merging algorithm was developed to cope with fractured objects. Different to the segmentation the merging works in the 2D space.
Planning the manoeuvre
The processed 2D blobs are passed to the planning algorithm in order to find a parking spot and plan the trajectory for the manoeuvre without any assumptions or prior knowledge about the environment. First the algorithm goes through the object list to find neighboring pairs with a valid parking spot between them. When additional checking and processing of the spots has been applied to all possible combinations of objects, one parking spot is selected. Finally, the set of selected target points is passed to the trajectory calculation algorithm.