ROboMObil Timeline
Software Development & Test Drives
The ROboMObil is DLR’s space-robotics driven-by-wire electro-mobile research platform for mechatronic actuators, vehicle dynamics control, human machine interfaces, AI-based and autonomous driving. Explore a more than ten-year timeline of research, hardware- and software-development. The potential of the ROboMObil is still being explored and the latest research results can always be found in our blog.
The ROboMObil’s innovative mechatronic chassis…
show more
The ROboMObil’s innovative mechatronic chassis is based on four identical Wheel Robots, each integrating a drive motor as well as braking, steering and damper systems. The operation of the Wheel Robots is coordinated by means of an intelligent central vehicle control. By virtue of the individual wheel steering, the ROboMObil exhibits an impressive manoeuvrability which even allows for driving sideways or rotating on the spot. This flexibility shows its full potential in urban or logistic contexts.
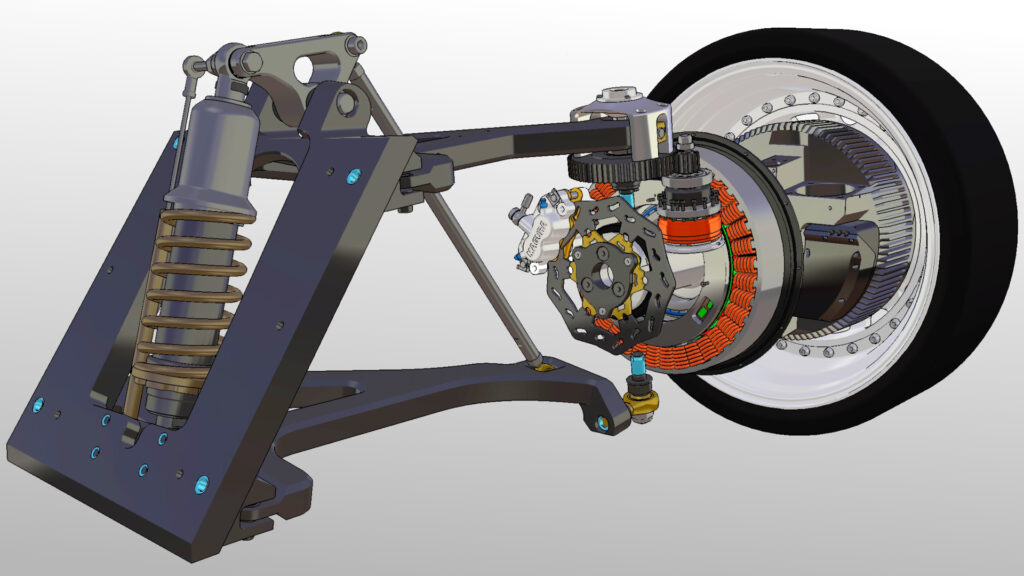
Research topics are methods and tools for modelling, simulation, and assessment of road vehicle dynamics as well as techniques for integrated chassis control and vehicle state estimation. These techniques are used, e.g., for a safe, precise and energy-efficient control of the ROboMObil’s motion. Further research activities comprise hybrid braking control for electric vehicles, which explores the use of real-time optimisation to exploit the combination of friction brake and electrical motor to improve the wheel slip control. Another research topic is the model based vertical dynamics control using semi-active dampers.
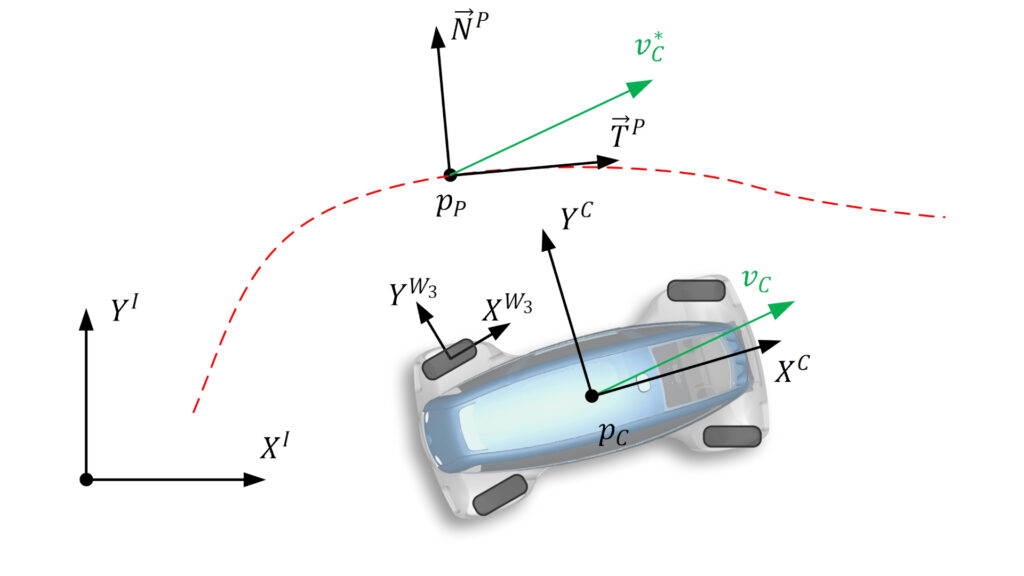
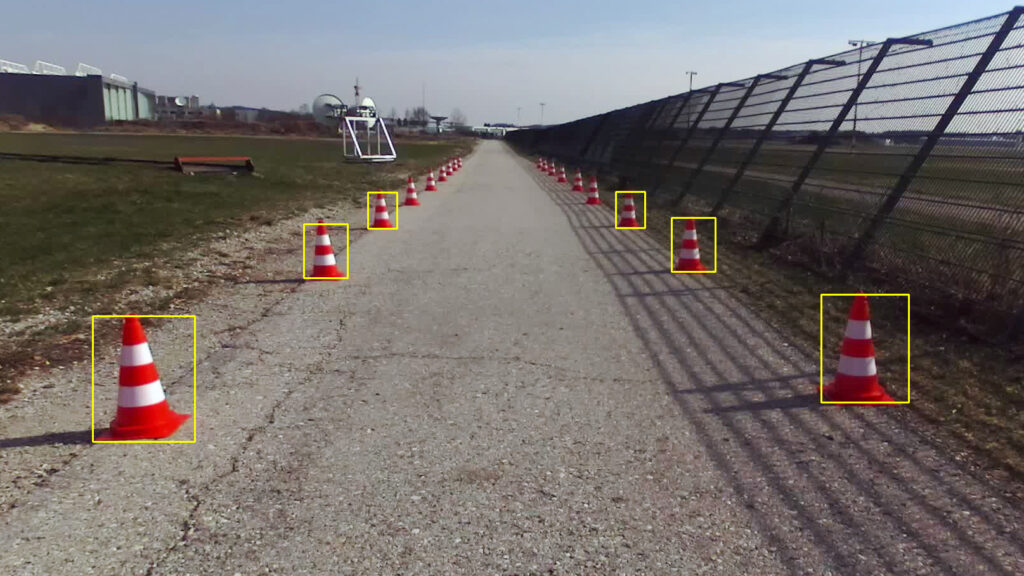
The ROboMObil can be operated fully manually, partially automated, or fully automatically. The vehicle’s desired motion can be commanded by the driver through a force-feedback sidestick with three degrees of freedom. Its path following control supports the latter modes by enabling the automatic following of a predefined path within constrained corridors.
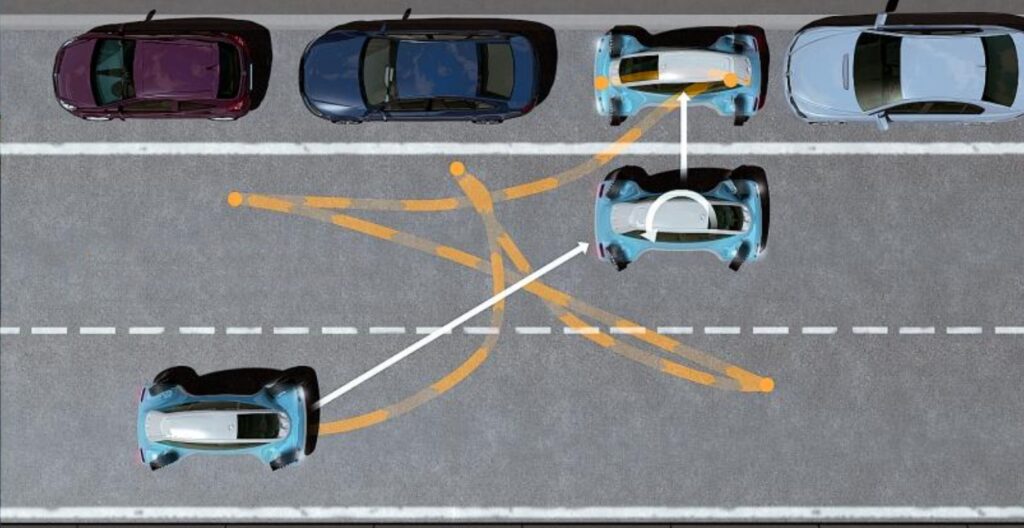
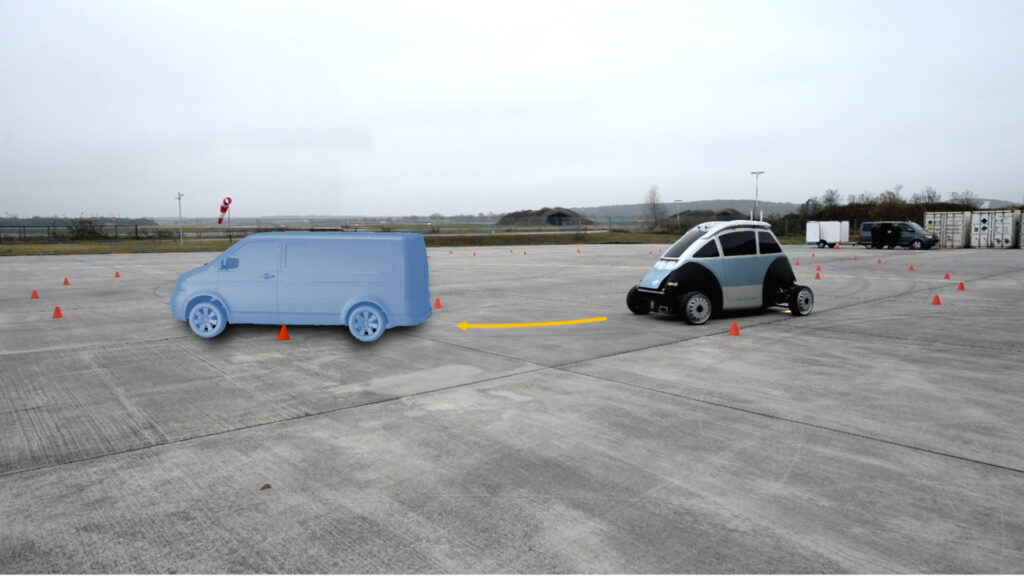
A platooning controller enables automated, safe following of preceding vehicles with a defined, speed dependent distance. Therefore, state information of the preceding vehicle is transmitted to the ROboMObil via Car2X communication.
Simulation tools play a central role for both the development and the validation of vehicle control functions. For this purpose, our virtual design and test environment provides complete detailed vehicle models using the object-oriented modelling language Modelica. In addition to multibody dynamics, these models also include sensors and electro-mechanical actuators. Hence, various domains, such as mechanics, electrics, and hydraulics, are combined in one model. Novel tool chains aim to automatically generate code for close-to-production electronic control units from the developed controllers.
In short, the ROboMObil provides a flexible platform for the research on integrated control and estimation algorithms for energy management and vehicle dynamics, together with the topics of autonomy and human-machine interfaces.
show less