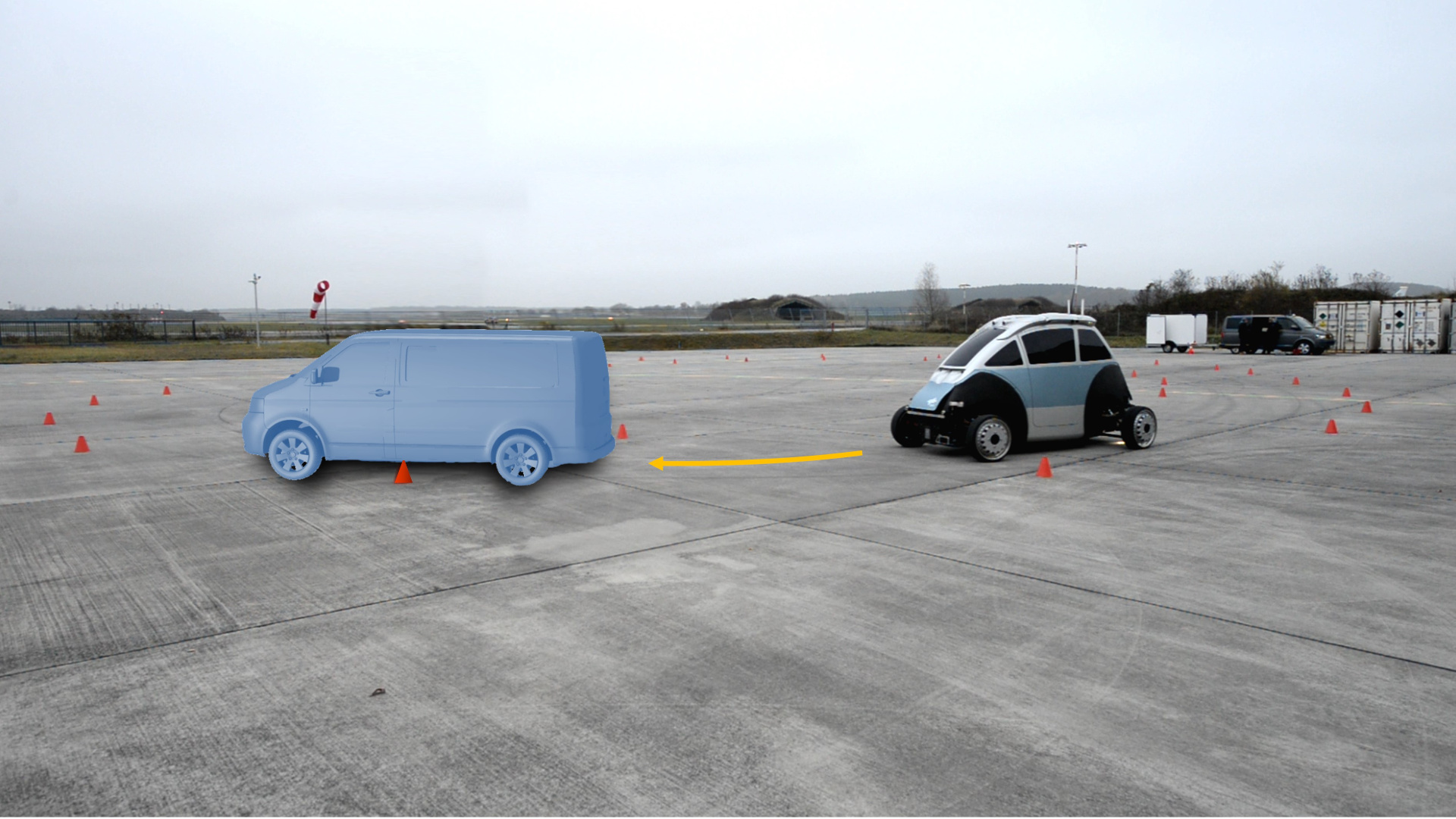
A Vehicle Following Controller (VFC) with inputs from Car2X communication was tested on the ROboMObil. The VFC´s aim is to determine appropriate control actions for the highly actuated electric vehicle so that the longitudinal and lateral motion of a target vehicle is followed. To achieve this goal, a combination of a non-linear guidance law, based on pure pursuit concepts, and a model-predictive method (for the longitudinal control) was explored. The tested method is able to handle actuation dynamics, physical constraints, and preview information. It also promotes high-energy efficiency, by maximizing the use of regenerative braking.
Nov 17th 2017
Vehicle following control using Car2X communication Categories: Software Development & Test Drives Timelines: RoboMobil-Timeline (English)
Mit einem Freund teilen