The ROboMObil’s maiden trip proceeded smoothly with a basic operating software supporting manual feedforward control of the vehicle via sidestick. Driving in all motion modes (longitudinal, lateral, rotational) as well as addressing of all three degrees of freedom was possible and successfully tested.
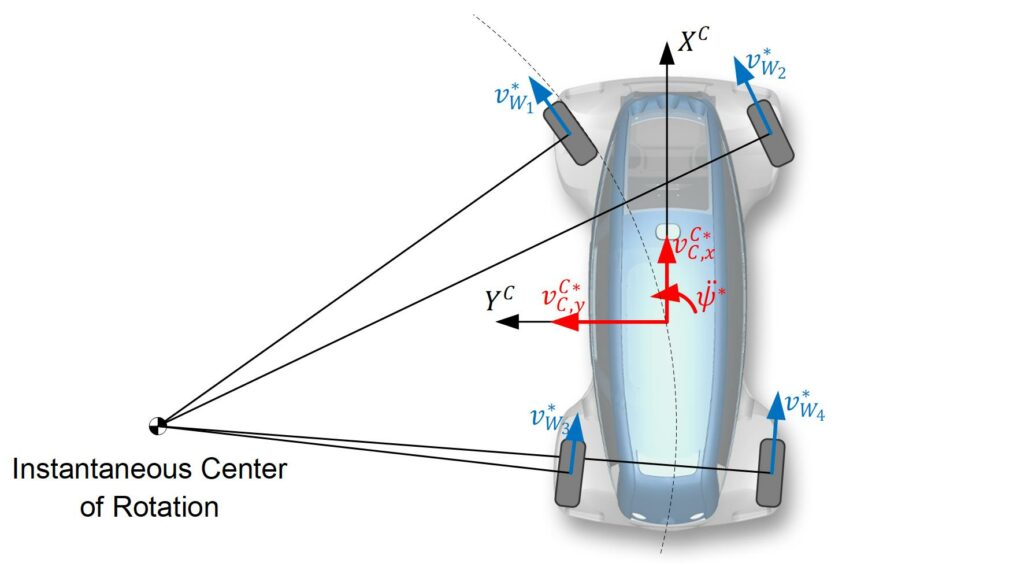
The simple forward motion control used here is based on geometric considerations neglecting tire slip. The so-called instantaneous center of rotation (ICR) is the point where all (virtually prolonged) wheel spin axes should intersect.
The next image shows a part of the human machine interface (HMI) which allows to switch between the motion modes. The present mode is “rotate”. In this case, the touchscreen enables the selection of an ICR (symbolized by the yellow marker). Then, the steering angles are commanded to facilitate the vehicle’s rotation about this ICR.
