Path following Control
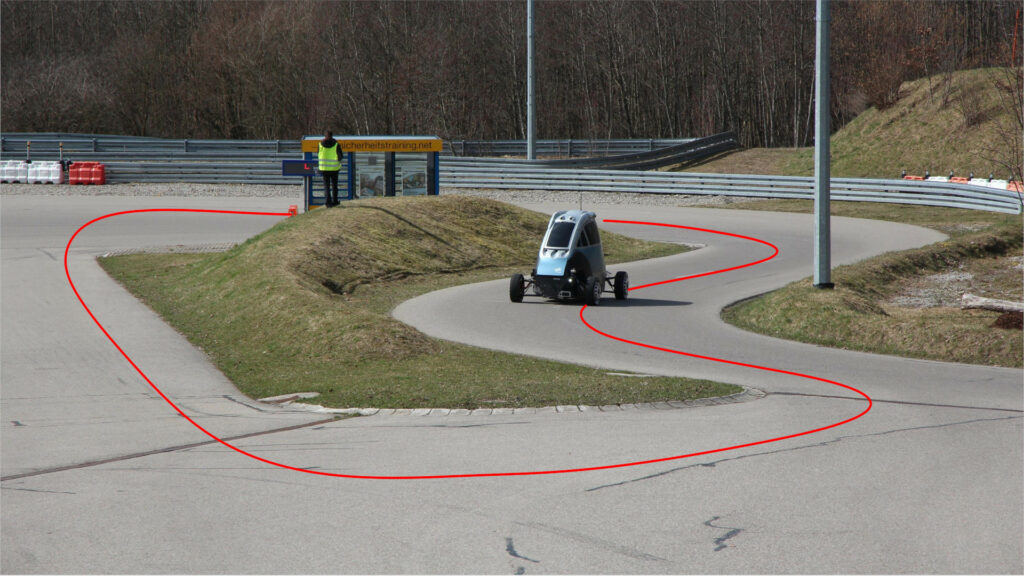
The proposed method enables the ROboMObil to automatically follow paths while the driver is free to control the velocity along the path using the stick. Moreover, two lateral degrees of freedom can be controlled relative to the path. Those are a) the lateral offset from the middle of the path and b), enabled by ROboMObil’s rear-axle-steering, an orientation offset (side slip angle).
Wheel slip control and vehicle dynamics control
A robust Model Predictive Controller (MPC) for linear parameter varying (LPV) systems was applied to the ROboMObil and tested on low friction and split friction surfaces. The applied controller relies on the constraint tightening method to guarantee that the MPC’s optimization problem remains feasible in the presence of additive disturbances. In order to decrease the conservativeness, the controller synthesis considers bounded parameter rate variations in the construction of the tightened constraints. Relevant features, such as recursive feasibility and stability of the LPV-MPC controller, were theoretically proven, and confirmed in real world test drives. Additionally, double lane change manoeuvres were performed utilizing the advanced vehicle dynamics controller (VDC).