Path following control
Here, a geometric path following control strategy with demand supervision applied to the ROboMObil is described. The proposed method enables the ROboMObil to automatically follow paths while the driver is free to control the velocity along the path. Beside the longitudinal degree of freedom, two lateral degrees of freedom can be controlled relative to the path. If this demand interface was provided without supervision, the driver may potentially overwrite the path following control in a manner such that the vehicle limits are violated and the vehicle becomes unstable. To avoid such critical situations a demand supervisor was introduced into the path following framework. An experimental validation of the presented approach implemented in the ROboMObil can be seen in the video.
Online path planning
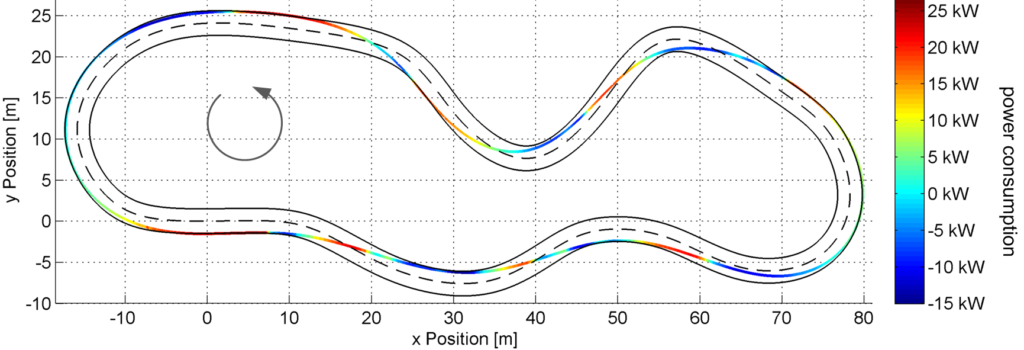
The results of the test drives on two different tracks with the ROboMObil utilizing the online path planning (OPP) and the path following control are shown below. An overview of the online planned path on the test track and the respective power consumption of the actuators is depicted. The colouring illustrates where power is consumed and where it is recuperated. The overall energy consumption of the actuators required to drive three laps of the optimized path and three laps in the middle of the test track (no optimization), acting as a reference, was evaluated. The required energy was clearly reduced by 19 % by the OPP although the drive time is also reduced by 10 %, which demonstrates the energy saving capabilities on this track. For both paths the same parameters of the velocity profile generation were used.
Impressions of the testing facility: