
Jan 10th 2025
Hybrid Simulation Models: Physics-enhanced Machine Learning by means of Neural Ordinary Differential Equations
Data-driven or derived through physics? This is a key question when modelling dynamical systems, where recent developments in machine learning yield remarkable results, while classical mathematical equations seem favorable but hard to derive. In contrast, hybrid simulation models aim to inherit the advantages of both white- and black-box modelling approaches. Neural Ordinary Differential Equations (NODEs) are a class of hybrid models that leverage differentiable numerical solvers and enable continuous-time simulation, handling of stiff systems and time-event handling. In the simplest case, an artificial neural network (NN) is used to replace the entire right-hand side of the differential equation:

with the (hidden) state x, the system input u and the time t.
To obtain a hybrid model, a more fine-grained NODE can be implemented, in which neural networks are inserted into the physical differential equations that describe the fundamental system behavior. This approach aims to learn only the missing effects such as friction or elasticities. This leads to better training convergence and significantly decreases the training-data demand.
In a proof-of-concept study, an exemplary linear quarter vehicle model (QVM) was extended by two non-linearities, namely a damper-friction and a quadratic spring characteristic, to generate a training data set. This set comprised only the time series data of the accelerations of the wheel and chassis masses (mb, mw), since accelerations are relatively easy to measure in a real-world setup.
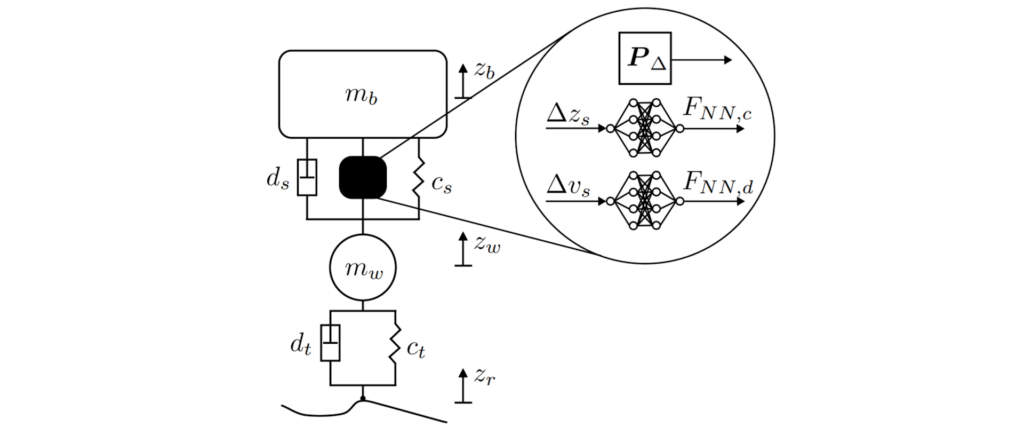
Then, a NODE-version of the QVM was trained on this dataset to show how missing effects can be learned using a hybrid modelling approach. The two neural networks are integrated directly into the differential equations and can be interpreted as an additional spring and an additional damper.

The figure above illustrates how the non-linearities are learned by a NODE hybrid model. It is noteworthy that only one training sequence of roughly 40 s was used, showcasing the extremely low data demand compared to a fully data-driven approach. Also, the stability of the model is not impaired by the neural components, since their influence is limited by design. Finally, the learned forces can be analyzed explicitly, e.g. by visualizing the functions and the input distribution of the training data.
In the corresponding publication Closing the Sim-to-Real Gap with Physics-Enhanced Neural ODEs, we further elaborate on how exactly the hybrid model is implemented, trained and optimized using some tricks of the trade, such as mini-batching and subsampling. Finally, we also show how the physical model parameters (e.g. the masses) can be optimized alongside the NNs using a set of trainable parameters PΔ.
Mit einem Freund teilen